Parameters of point cloud triangulation.
More...
|
| unsafe | TriangulationParameters () |
| | Constructs an empty (default-constructed) instance.
|
| unsafe | TriangulationParameters (int numNeighbours, float radius, float critAngle, float boundaryAngle, float critHoleLength, bool automaticRadiusIncrease, MR.Const_PointCloud? searchNeighbors) |
| | Constructs MR.TriangulationParameters elementwise.
|
| unsafe | TriangulationParameters (MR.Const_TriangulationParameters _other) |
| | Generated from constructor MR.TriangulationParameters.TriangulationParameters.
|
| | TriangulationParameters (TriangulationParameters _other) |
| | Generated from constructor MR.TriangulationParameters.TriangulationParameters.
|
| unsafe MR.TriangulationParameters | assign (MR.Const_TriangulationParameters _other) |
| | Generated from method MR::TriangulationParameters::operator=.
|
| virtual void | Dispose () |
| unsafe | Const_TriangulationParameters () |
| | Constructs an empty (default-constructed) instance.
|
| unsafe | Const_TriangulationParameters (int numNeighbours, float radius, float critAngle, float boundaryAngle, float critHoleLength, bool automaticRadiusIncrease, MR.Const_PointCloud? searchNeighbors) |
| | Constructs MR.TriangulationParameters elementwise.
|
| unsafe | Const_TriangulationParameters (MR.Const_TriangulationParameters _other) |
| | Generated from constructor MR.TriangulationParameters.TriangulationParameters.
|
| | Const_TriangulationParameters (TriangulationParameters _other) |
| | Generated from constructor MR.TriangulationParameters.TriangulationParameters.
|
|
| new unsafe ref int | numNeighbours [get] |
| | The number of nearest neighbor points to use for building of local triangulation.
|
| new unsafe ref float | radius [get] |
| | Radius of neighborhood around each point to consider for building local triangulation. This is an alternative to numNeighbours parameter. Please set to positive value only one of them.
|
| new unsafe ref float | critAngle [get] |
| | Critical angle of triangles in local triangulation (angle between triangles in fan should be less then this value) <table border=0> <caption id="TriangulationParameters::critAngle_examples"></caption> <tr> <td>.
|
| new unsafe ref float | boundaryAngle [get] |
| | the vertex is considered as boundary if its neighbor ring has angle more than this value
|
| new unsafe ref float | critHoleLength [get] |
| | Critical length of hole (all holes with length less then this value will be filled)
|
| new unsafe ref bool | automaticRadiusIncrease [get] |
| | automatic increase of the radius if points outside can make triangles from original radius not-Delone
|
| new unsafe MR.? Const_PointCloud | searchNeighbors [get, set] |
| | optional: if provided this cloud will be used for searching of neighbors (so it must have same validPoints)
|
| unsafe int | numNeighbours [get] |
| | The number of nearest neighbor points to use for building of local triangulation.
|
| unsafe float | radius [get] |
| | Radius of neighborhood around each point to consider for building local triangulation. This is an alternative to numNeighbours parameter. Please set to positive value only one of them.
|
| unsafe float | critAngle [get] |
| | Critical angle of triangles in local triangulation (angle between triangles in fan should be less then this value) <table border=0> <caption id="TriangulationParameters::critAngle_examples"></caption> <tr> <td>.
|
| unsafe float | boundaryAngle [get] |
| | the vertex is considered as boundary if its neighbor ring has angle more than this value
|
| unsafe float | critHoleLength [get] |
| | Critical length of hole (all holes with length less then this value will be filled)
|
| unsafe bool | automaticRadiusIncrease [get] |
| | automatic increase of the radius if points outside can make triangles from original radius not-Delone
|
| unsafe MR.? Const_PointCloud | searchNeighbors [get] |
| | optional: if provided this cloud will be used for searching of neighbors (so it must have same validPoints)
|
Parameters of point cloud triangulation.
- See also
- triangulatePointCloud Generated from class MR.TriangulationParameters. This is the non-const half of the class.
◆ TriangulationParameters() [1/4]
| unsafe MR.TriangulationParameters.TriangulationParameters |
( |
| ) |
|
|
inline |
Constructs an empty (default-constructed) instance.
◆ TriangulationParameters() [2/4]
| unsafe MR.TriangulationParameters.TriangulationParameters |
( |
int | numNeighbours, |
|
|
float | radius, |
|
|
float | critAngle, |
|
|
float | boundaryAngle, |
|
|
float | critHoleLength, |
|
|
bool | automaticRadiusIncrease, |
|
|
MR.Const_PointCloud? | searchNeighbors ) |
|
inline |
◆ TriangulationParameters() [3/4]
◆ TriangulationParameters() [4/4]
◆ assign()
Generated from method MR::TriangulationParameters::operator=.
◆ automaticRadiusIncrease
| new unsafe ref bool MR.TriangulationParameters.automaticRadiusIncrease |
|
get |
automatic increase of the radius if points outside can make triangles from original radius not-Delone
◆ boundaryAngle
| new unsafe ref float MR.TriangulationParameters.boundaryAngle |
|
get |
the vertex is considered as boundary if its neighbor ring has angle more than this value
◆ critAngle
| new unsafe ref float MR.TriangulationParameters.critAngle |
|
get |
Critical angle of triangles in local triangulation (angle between triangles in fan should be less then this value) <table border=0> <caption id="TriangulationParameters::critAngle_examples"></caption> <tr> <td>.
"Good" width = 350cm </td>
<td>
"Too small value" width = 350cm </td>
</tr> </table>
◆ critHoleLength
| new unsafe ref float MR.TriangulationParameters.critHoleLength |
|
get |
Critical length of hole (all holes with length less then this value will be filled)
If value is subzero it is set automaticly to 0.7*bbox.diagonal()
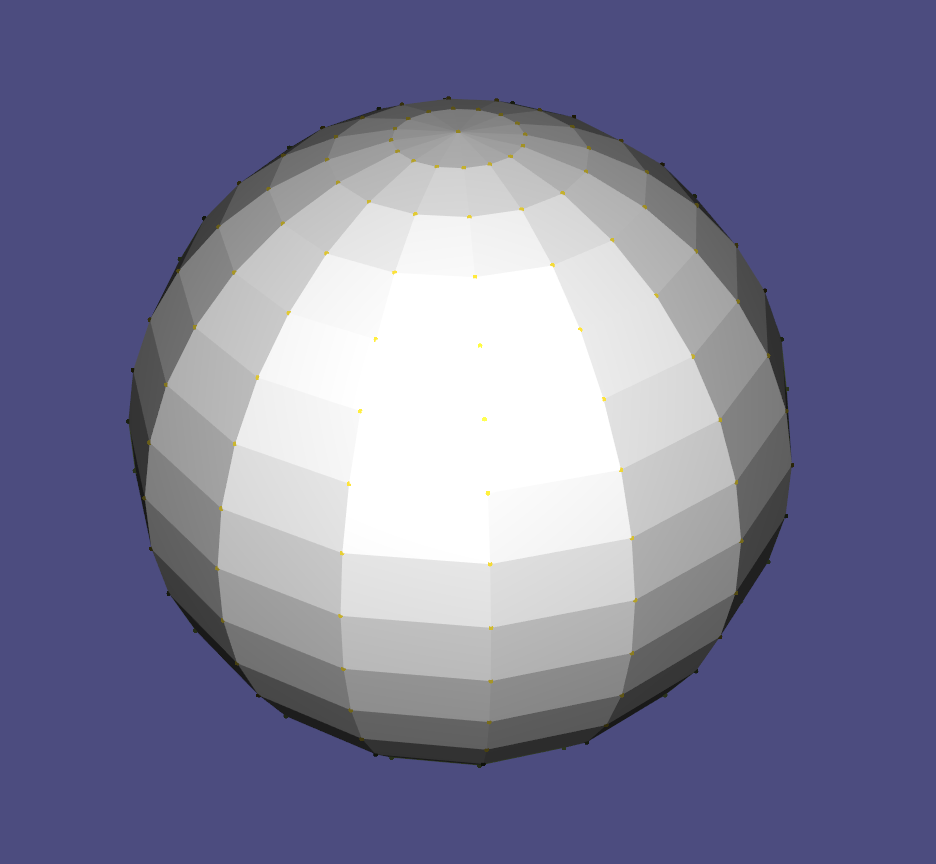
◆ numNeighbours
| new unsafe ref int MR.TriangulationParameters.numNeighbours |
|
get |
The number of nearest neighbor points to use for building of local triangulation.
- Note
- Too small value can make not optimal triangulation and additional holes
Too big value increases difficulty of optimization and decreases performance <table border=0> <caption id="TriangulationParameters::numNeighbours_examples"></caption> <tr> <td>
"Good" width = 350cm </td>
<td>

"Too small value" width = 350cm </td>
</tr> </table>
◆ radius
| new unsafe ref float MR.TriangulationParameters.radius |
|
get |
Radius of neighborhood around each point to consider for building local triangulation. This is an alternative to numNeighbours parameter. Please set to positive value only one of them.
◆ searchNeighbors
optional: if provided this cloud will be used for searching of neighbors (so it must have same validPoints)
The documentation for this class was generated from the following file: