|
MeshLib C# Docs
|
|
MeshLib C# Docs
|
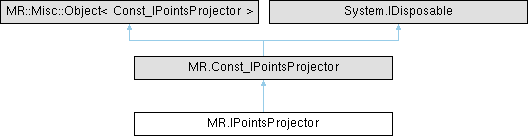
abstract class for computing the closest points of point clouds Generated from class MR.IPointsProjector. Derived classes: Direct: (non-virtual) MR.Cuda.PointsProjector MR.PointsProjector This is the non-const half of the class. More...
Public Member Functions | |
| unsafe void | setPointCloud (MR.Const_PointCloud pointCloud) |
| sets the reference point cloud Generated from method MR.IPointsProjector.setPointCloud. | |
| Public Member Functions inherited from MR.Const_IPointsProjector | |
| virtual void | Dispose () |
| unsafe void | findProjections (MR.Std.Vector_MRPointsProjectionResult results, MR.Std.Const_Vector_MRVector3f points, MR.Const_FindProjectionOnPointsSettings settings) |
| computes the closest points on point cloud to given points Generated from method MR.IPointsProjector.findProjections. | |
| unsafe nuint | projectionsHeapBytes (nuint numProjections) |
| Returns amount of memory needed to compute projections Generated from method MR.IPointsProjector.projectionsHeapBytes. | |
Additional Inherited Members | |
| Protected Member Functions inherited from MR.Const_IPointsProjector | |
| virtual unsafe void | Dispose (bool disposing) |
abstract class for computing the closest points of point clouds Generated from class MR.IPointsProjector. Derived classes: Direct: (non-virtual) MR.Cuda.PointsProjector MR.PointsProjector This is the non-const half of the class.
|
inline |
sets the reference point cloud Generated from method MR.IPointsProjector.setPointCloud.