|
MeshLib C Docs
|
|
MeshLib C Docs
|
Go to the source code of this file.
Typedefs | |
| typedef struct MR_TriangulationParameters | MR_TriangulationParameters |
| Parameters of point cloud triangulation. | |
| typedef struct MR_TriangulateHolesParams | MR_TriangulateHolesParams |
| typedef struct MR_TriangulateHolesParams MR_TriangulateHolesParams |
Generated from class MR::TriangulateHolesParams. Supported MR_PassBy modes: MR_PassBy_DefaultConstruct, MR_PassBy_Copy, MR_PassBy_Move (and MR_PassBy_DefaultArgument and MR_PassBy_NoObject if supported by the callee).
| typedef struct MR_TriangulationParameters MR_TriangulationParameters |
Parameters of point cloud triangulation.
| MRC_API bool MR_fillHolesWithExtraPoints | ( | MR_Mesh * | mesh, |
| MR_PointCloud * | extraPoints, | ||
| const MR_TriangulateHolesParams * | params, | ||
| const MR_std_function_bool_from_float * | progressCb ) |
fills the holes in the mesh by adding triangles to it with the vertices in existing boundary vertices or given extra points (in any combination)
| extraPoints | must have either properly oriented normals or no normals, and it will be temporary modified during the call |
| MRC_API bool MR_triangulateHoles | ( | MR_Mesh * | mesh, |
| const MR_TriangulateHolesParams * | params, | ||
| const MR_std_function_bool_from_float * | progressCb ) |
fills the holes in the mesh by adding triangles to it with the vertices in existing boundary vertices
| MRC_API MR_TriangulateHolesParams * MR_TriangulateHolesParams_AssignFromAnother | ( | MR_TriangulateHolesParams * | _this, |
| const MR_TriangulateHolesParams * | _other ) |
Generated from method MR::TriangulateHolesParams::operator=. Parameter _this can not be null. It is a single object. Parameter _other can not be null. It is a single object. The reference to things referred to by the parameter _other (if any) might be preserved in this object. The returned pointer will never be null. It is non-owning, do NOT destroy it. When this function is called, this object will drop any object references it held previously.
| MRC_API MR_TriangulateHolesParams * MR_TriangulateHolesParams_ConstructFrom | ( | const MR_TriangulationParameters * | triangulation, |
| const MR_VertBitSet * | modifyBdVertices ) |
Constructs MR::TriangulateHolesParams elementwise. Parameter triangulation can not be null. It is a single object. The reference to the parameter triangulation might be preserved in the constructed object. The reference to the parameter modifyBdVertices might be preserved in the constructed object. Never returns null. Returns an instance allocated on the heap! Must call MR_TriangulateHolesParams_Destroy() to free it when you're done using it. When this function is called, this object will drop any object references it held previously.
| MRC_API MR_TriangulateHolesParams * MR_TriangulateHolesParams_ConstructFromAnother | ( | const MR_TriangulateHolesParams * | _other | ) |
Generated from constructor MR::TriangulateHolesParams::TriangulateHolesParams. Parameter _other can not be null. It is a single object. The reference to things referred to by the parameter _other (if any) might be preserved in the constructed object. Never returns null. Returns an instance allocated on the heap! Must call MR_TriangulateHolesParams_Destroy() to free it when you're done using it.
| MRC_API MR_TriangulateHolesParams * MR_TriangulateHolesParams_DefaultConstruct | ( | void | ) |
Constructs an empty (default-constructed) instance. Never returns null. Returns an instance allocated on the heap! Must call MR_TriangulateHolesParams_Destroy() to free it when you're done using it.
| MRC_API MR_TriangulateHolesParams * MR_TriangulateHolesParams_DefaultConstructArray | ( | size_t | num_elems | ) |
Constructs an array of empty (default-constructed) instances, of the specified size. Will never return null. The array must be destroyed using MR_TriangulateHolesParams_DestroyArray(). Use MR_TriangulateHolesParams_OffsetMutablePtr() and MR_TriangulateHolesParams_OffsetPtr() to access the array elements.
| MRC_API void MR_TriangulateHolesParams_Destroy | ( | const MR_TriangulateHolesParams * | _this | ) |
Destroys a heap-allocated instance of MR_TriangulateHolesParams. Does nothing if the pointer is null.
| MRC_API void MR_TriangulateHolesParams_DestroyArray | ( | const MR_TriangulateHolesParams * | _this | ) |
Destroys a heap-allocated array of MR_TriangulateHolesParams. Does nothing if the pointer is null.
| MRC_API const MR_VertBitSet *const * MR_TriangulateHolesParams_Get_modifyBdVertices | ( | const MR_TriangulateHolesParams * | _this | ) |
if nullptr, then any boundary vertex of input mesh can get new triangles; otherwise only vertices from modifyBdVertices can get new triangles Returns a pointer to a member variable of class MR::TriangulateHolesParams named modifyBdVertices. Parameter _this can not be null. It is a single object. The returned pointer will never be null. It is non-owning, do NOT destroy it. The reference to this object might be preserved as the return value.
| MRC_API const MR_TriangulationParameters * MR_TriangulateHolesParams_Get_triangulation | ( | const MR_TriangulateHolesParams * | _this | ) |
Returns a pointer to a member variable of class MR::TriangulateHolesParams named triangulation. Parameter _this can not be null. It is a single object. The returned pointer will never be null. It is non-owning, do NOT destroy it. The reference to this object might be preserved as the return value.
| MRC_API const MR_VertBitSet ** MR_TriangulateHolesParams_GetMutable_modifyBdVertices | ( | MR_TriangulateHolesParams * | _this | ) |
if nullptr, then any boundary vertex of input mesh can get new triangles; otherwise only vertices from modifyBdVertices can get new triangles Returns a mutable pointer to a member variable of class MR::TriangulateHolesParams named modifyBdVertices. Parameter _this can not be null. It is a single object. The returned pointer will never be null. It is non-owning, do NOT destroy it. The reference to this object might be preserved as the return value.
| MRC_API MR_TriangulationParameters * MR_TriangulateHolesParams_GetMutable_triangulation | ( | MR_TriangulateHolesParams * | _this | ) |
Returns a mutable pointer to a member variable of class MR::TriangulateHolesParams named triangulation. Parameter _this can not be null. It is a single object. The returned pointer will never be null. It is non-owning, do NOT destroy it. The reference to this object might be preserved as the return value.
| MRC_API MR_TriangulateHolesParams * MR_TriangulateHolesParams_OffsetMutablePtr | ( | MR_TriangulateHolesParams * | ptr, |
| ptrdiff_t | i ) |
Offsets a pointer to an array element by i positions (not bytes). Use only if you're certain that the pointer points to an array element. The reference to the parameter ptr might be preserved in the return value.
| MRC_API const MR_TriangulateHolesParams * MR_TriangulateHolesParams_OffsetPtr | ( | const MR_TriangulateHolesParams * | ptr, |
| ptrdiff_t | i ) |
Offsets a pointer to an array element by i positions (not bytes). Use only if you're certain that the pointer points to an array element. The reference to the parameter ptr might be preserved in the return value.
| MRC_API void MR_TriangulateHolesParams_Set_modifyBdVertices | ( | MR_TriangulateHolesParams * | _this, |
| const MR_VertBitSet * | value ) |
if nullptr, then any boundary vertex of input mesh can get new triangles; otherwise only vertices from modifyBdVertices can get new triangles Modifies a member variable of class MR::TriangulateHolesParams named modifyBdVertices. Parameter _this can not be null. It is a single object. The reference to the parameter value might be preserved in this object in element modifyBdVertices. When this function is called, this object will drop object references it held previously in modifyBdVertices.
| MRC_API void MR_TriangulateHolesParams_Set_triangulation | ( | MR_TriangulateHolesParams * | _this, |
| const MR_TriangulationParameters * | value ) |
Modifies a member variable of class MR::TriangulateHolesParams named triangulation. Parameter _this can not be null. It is a single object. Parameter value can not be null. It is a single object. The reference to the parameter value might be preserved in this object in element triangulation. When this function is called, this object will drop object references it held previously in triangulation.
| MRC_API MR_std_optional_MR_Mesh * MR_triangulatePointCloud | ( | const MR_PointCloud * | pointCloud, |
| const MR_TriangulationParameters * | params, | ||
| const MR_std_function_bool_from_float * | progressCb ) |
Creates mesh from given point cloud according params Returns empty optional if was interrupted by progress bar.
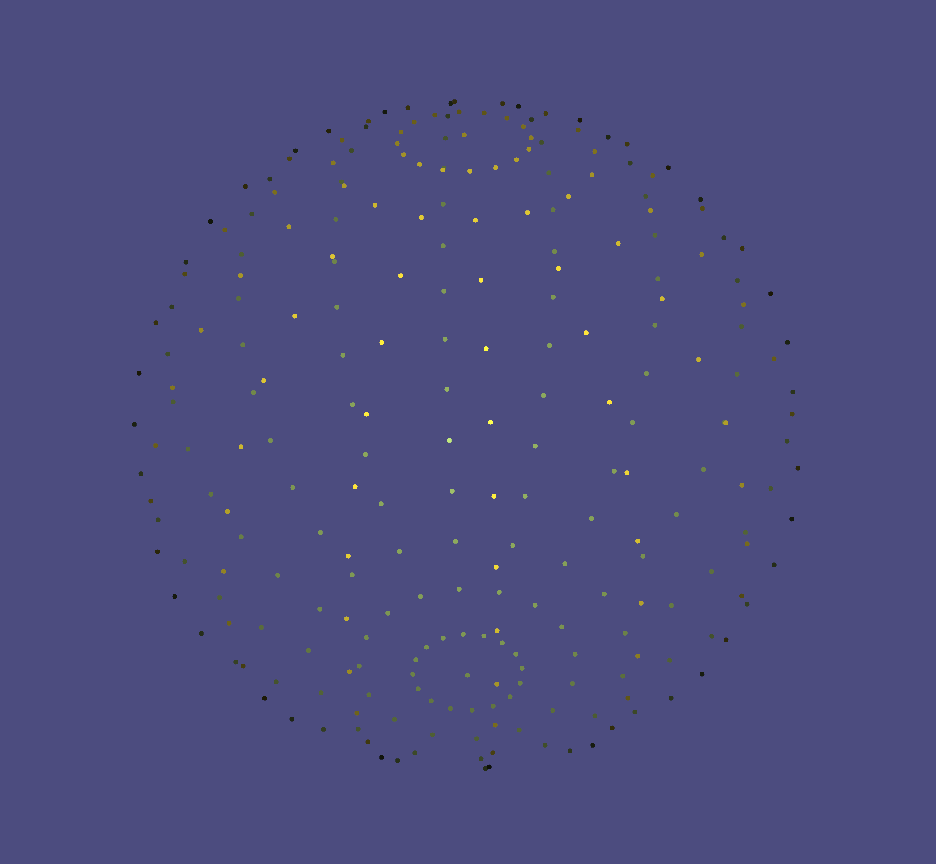
Before | 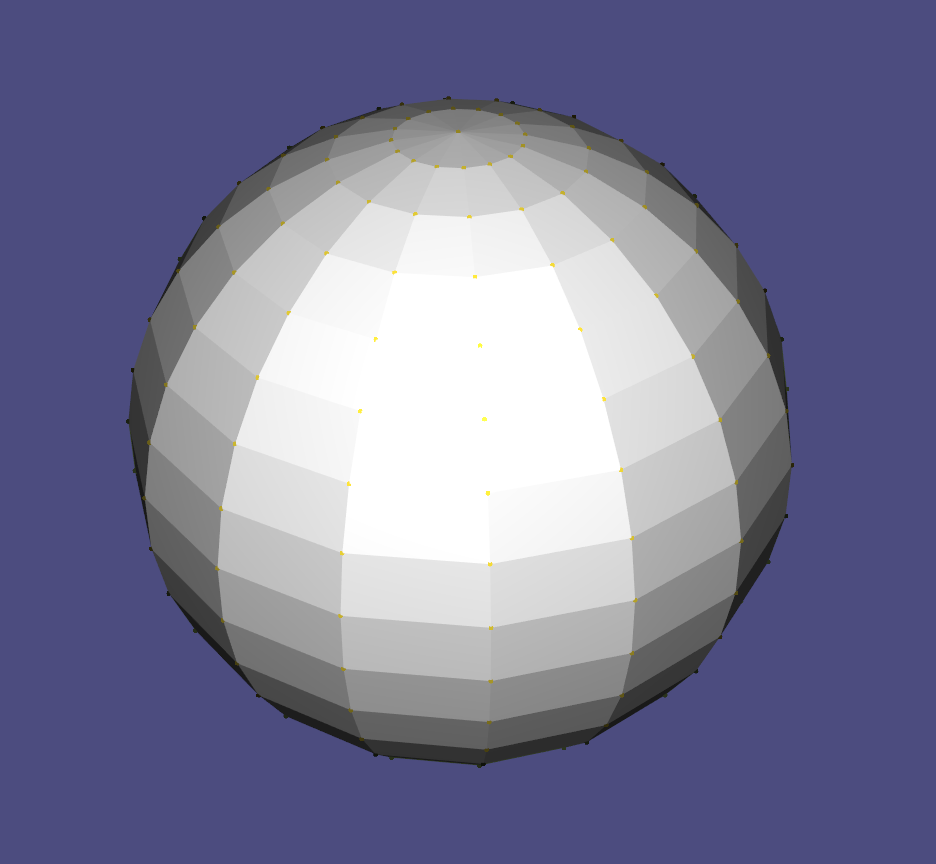
After |
Generated from function MR::triangulatePointCloud. Parameter pointCloud can not be null. It is a single object. Parameter params is a single object. Parameter params has a default argument: {}, pass a null pointer to use it. Parameter progressCb is a single object. Parameter progressCb has a default argument: {}, pass a null pointer to use it. Never returns null. Returns an instance allocated on the heap! Must call MR_std_optional_MR_Mesh_Destroy() to free it when you're done using it.
| MRC_API MR_TriangulationParameters * MR_TriangulationParameters_AssignFromAnother | ( | MR_TriangulationParameters * | _this, |
| const MR_TriangulationParameters * | _other ) |
Generated from method MR::TriangulationParameters::operator=. Parameter _this can not be null. It is a single object. Parameter _other can not be null. It is a single object. The reference to things referred to by the parameter _other (if any) might be preserved in this object. The returned pointer will never be null. It is non-owning, do NOT destroy it. When this function is called, this object will drop any object references it held previously.
| MRC_API MR_TriangulationParameters * MR_TriangulationParameters_ConstructFrom | ( | int | numNeighbours, |
| float | radius, | ||
| float | critAngle, | ||
| float | boundaryAngle, | ||
| float | critHoleLength, | ||
| bool | automaticRadiusIncrease, | ||
| const MR_PointCloud * | searchNeighbors ) |
Constructs MR::TriangulationParameters elementwise. The reference to the parameter searchNeighbors might be preserved in the constructed object. Never returns null. Returns an instance allocated on the heap! Must call MR_TriangulationParameters_Destroy() to free it when you're done using it. When this function is called, this object will drop any object references it held previously.
| MRC_API MR_TriangulationParameters * MR_TriangulationParameters_ConstructFromAnother | ( | const MR_TriangulationParameters * | _other | ) |
Generated from constructor MR::TriangulationParameters::TriangulationParameters. Parameter _other can not be null. It is a single object. The reference to things referred to by the parameter _other (if any) might be preserved in the constructed object. Never returns null. Returns an instance allocated on the heap! Must call MR_TriangulationParameters_Destroy() to free it when you're done using it.
| MRC_API MR_TriangulationParameters * MR_TriangulationParameters_DefaultConstruct | ( | void | ) |
Constructs an empty (default-constructed) instance. Never returns null. Returns an instance allocated on the heap! Must call MR_TriangulationParameters_Destroy() to free it when you're done using it.
| MRC_API MR_TriangulationParameters * MR_TriangulationParameters_DefaultConstructArray | ( | size_t | num_elems | ) |
Constructs an array of empty (default-constructed) instances, of the specified size. Will never return null. The array must be destroyed using MR_TriangulationParameters_DestroyArray(). Use MR_TriangulationParameters_OffsetMutablePtr() and MR_TriangulationParameters_OffsetPtr() to access the array elements.
| MRC_API void MR_TriangulationParameters_Destroy | ( | const MR_TriangulationParameters * | _this | ) |
Destroys a heap-allocated instance of MR_TriangulationParameters. Does nothing if the pointer is null.
| MRC_API void MR_TriangulationParameters_DestroyArray | ( | const MR_TriangulationParameters * | _this | ) |
Destroys a heap-allocated array of MR_TriangulationParameters. Does nothing if the pointer is null.
| MRC_API const bool * MR_TriangulationParameters_Get_automaticRadiusIncrease | ( | const MR_TriangulationParameters * | _this | ) |
automatic increase of the radius if points outside can make triangles from original radius not-Delone Returns a pointer to a member variable of class MR::TriangulationParameters named automaticRadiusIncrease. Parameter _this can not be null. It is a single object. The returned pointer will never be null. It is non-owning, do NOT destroy it. The reference to this object might be preserved as the return value.
| MRC_API const float * MR_TriangulationParameters_Get_boundaryAngle | ( | const MR_TriangulationParameters * | _this | ) |
the vertex is considered as boundary if its neighbor ring has angle more than this value Returns a pointer to a member variable of class MR::TriangulationParameters named boundaryAngle. Parameter _this can not be null. It is a single object. The returned pointer will never be null. It is non-owning, do NOT destroy it. The reference to this object might be preserved as the return value.
| MRC_API const float * MR_TriangulationParameters_Get_critAngle | ( | const MR_TriangulationParameters * | _this | ) |
Critical angle of triangles in local triangulation (angle between triangles in fan should be less then this value)
|
Good | 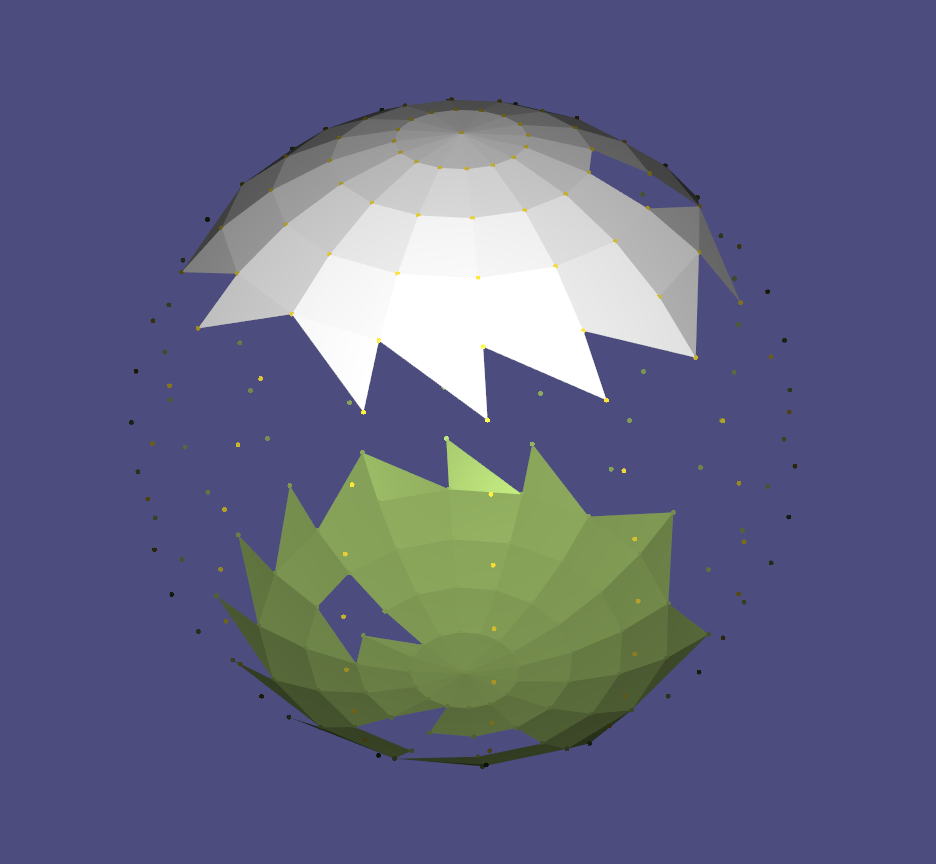
Too small value |
Returns a pointer to a member variable of class MR::TriangulationParameters named critAngle. Parameter _this can not be null. It is a single object. The returned pointer will never be null. It is non-owning, do NOT destroy it. The reference to this object might be preserved as the return value.
| MRC_API const float * MR_TriangulationParameters_Get_critHoleLength | ( | const MR_TriangulationParameters * | _this | ) |
Critical length of hole (all holes with length less then this value will be filled)
If value is subzero it is set automaticly to 0.7*bbox.diagonal() Returns a pointer to a member variable of class MR::TriangulationParameters named critHoleLength. Parameter _this can not be null. It is a single object. The returned pointer will never be null. It is non-owning, do NOT destroy it. The reference to this object might be preserved as the return value.
| MRC_API const int * MR_TriangulationParameters_Get_numNeighbours | ( | const MR_TriangulationParameters * | _this | ) |
The number of nearest neighbor points to use for building of local triangulation.
|
Good | 
Too small value |
Returns a pointer to a member variable of class MR::TriangulationParameters named numNeighbours. Parameter _this can not be null. It is a single object. The returned pointer will never be null. It is non-owning, do NOT destroy it. The reference to this object might be preserved as the return value.
| MRC_API const float * MR_TriangulationParameters_Get_radius | ( | const MR_TriangulationParameters * | _this | ) |
Radius of neighborhood around each point to consider for building local triangulation. This is an alternative to numNeighbours parameter. Please set to positive value only one of them. Returns a pointer to a member variable of class MR::TriangulationParameters named radius. Parameter _this can not be null. It is a single object. The returned pointer will never be null. It is non-owning, do NOT destroy it. The reference to this object might be preserved as the return value.
| MRC_API const MR_PointCloud *const * MR_TriangulationParameters_Get_searchNeighbors | ( | const MR_TriangulationParameters * | _this | ) |
optional: if provided this cloud will be used for searching of neighbors (so it must have same validPoints) Returns a pointer to a member variable of class MR::TriangulationParameters named searchNeighbors. Parameter _this can not be null. It is a single object. The returned pointer will never be null. It is non-owning, do NOT destroy it. The reference to this object might be preserved as the return value.
| MRC_API bool * MR_TriangulationParameters_GetMutable_automaticRadiusIncrease | ( | MR_TriangulationParameters * | _this | ) |
automatic increase of the radius if points outside can make triangles from original radius not-Delone Returns a mutable pointer to a member variable of class MR::TriangulationParameters named automaticRadiusIncrease. Parameter _this can not be null. It is a single object. The returned pointer will never be null. It is non-owning, do NOT destroy it. The reference to this object might be preserved as the return value.
| MRC_API float * MR_TriangulationParameters_GetMutable_boundaryAngle | ( | MR_TriangulationParameters * | _this | ) |
the vertex is considered as boundary if its neighbor ring has angle more than this value Returns a mutable pointer to a member variable of class MR::TriangulationParameters named boundaryAngle. Parameter _this can not be null. It is a single object. The returned pointer will never be null. It is non-owning, do NOT destroy it. The reference to this object might be preserved as the return value.
| MRC_API float * MR_TriangulationParameters_GetMutable_critAngle | ( | MR_TriangulationParameters * | _this | ) |
Critical angle of triangles in local triangulation (angle between triangles in fan should be less then this value)
|
Good |
Too small value |
Returns a mutable pointer to a member variable of class MR::TriangulationParameters named critAngle. Parameter _this can not be null. It is a single object. The returned pointer will never be null. It is non-owning, do NOT destroy it. The reference to this object might be preserved as the return value.
| MRC_API float * MR_TriangulationParameters_GetMutable_critHoleLength | ( | MR_TriangulationParameters * | _this | ) |
Critical length of hole (all holes with length less then this value will be filled)
If value is subzero it is set automaticly to 0.7*bbox.diagonal() Returns a mutable pointer to a member variable of class MR::TriangulationParameters named critHoleLength. Parameter _this can not be null. It is a single object. The returned pointer will never be null. It is non-owning, do NOT destroy it. The reference to this object might be preserved as the return value.
| MRC_API int * MR_TriangulationParameters_GetMutable_numNeighbours | ( | MR_TriangulationParameters * | _this | ) |
The number of nearest neighbor points to use for building of local triangulation.
|
Good |
Too small value |
Returns a mutable pointer to a member variable of class MR::TriangulationParameters named numNeighbours. Parameter _this can not be null. It is a single object. The returned pointer will never be null. It is non-owning, do NOT destroy it. The reference to this object might be preserved as the return value.
| MRC_API float * MR_TriangulationParameters_GetMutable_radius | ( | MR_TriangulationParameters * | _this | ) |
Radius of neighborhood around each point to consider for building local triangulation. This is an alternative to numNeighbours parameter. Please set to positive value only one of them. Returns a mutable pointer to a member variable of class MR::TriangulationParameters named radius. Parameter _this can not be null. It is a single object. The returned pointer will never be null. It is non-owning, do NOT destroy it. The reference to this object might be preserved as the return value.
| MRC_API const MR_PointCloud ** MR_TriangulationParameters_GetMutable_searchNeighbors | ( | MR_TriangulationParameters * | _this | ) |
optional: if provided this cloud will be used for searching of neighbors (so it must have same validPoints) Returns a mutable pointer to a member variable of class MR::TriangulationParameters named searchNeighbors. Parameter _this can not be null. It is a single object. The returned pointer will never be null. It is non-owning, do NOT destroy it. The reference to this object might be preserved as the return value.
| MRC_API MR_TriangulationParameters * MR_TriangulationParameters_OffsetMutablePtr | ( | MR_TriangulationParameters * | ptr, |
| ptrdiff_t | i ) |
Offsets a pointer to an array element by i positions (not bytes). Use only if you're certain that the pointer points to an array element. The reference to the parameter ptr might be preserved in the return value.
| MRC_API const MR_TriangulationParameters * MR_TriangulationParameters_OffsetPtr | ( | const MR_TriangulationParameters * | ptr, |
| ptrdiff_t | i ) |
Offsets a pointer to an array element by i positions (not bytes). Use only if you're certain that the pointer points to an array element. The reference to the parameter ptr might be preserved in the return value.
| MRC_API void MR_TriangulationParameters_Set_automaticRadiusIncrease | ( | MR_TriangulationParameters * | _this, |
| bool | value ) |
automatic increase of the radius if points outside can make triangles from original radius not-Delone Modifies a member variable of class MR::TriangulationParameters named automaticRadiusIncrease. Parameter _this can not be null. It is a single object. When this function is called, this object will drop object references it held previously in automaticRadiusIncrease.
| MRC_API void MR_TriangulationParameters_Set_boundaryAngle | ( | MR_TriangulationParameters * | _this, |
| float | value ) |
the vertex is considered as boundary if its neighbor ring has angle more than this value Modifies a member variable of class MR::TriangulationParameters named boundaryAngle. Parameter _this can not be null. It is a single object. When this function is called, this object will drop object references it held previously in boundaryAngle.
| MRC_API void MR_TriangulationParameters_Set_critAngle | ( | MR_TriangulationParameters * | _this, |
| float | value ) |
Critical angle of triangles in local triangulation (angle between triangles in fan should be less then this value)
|
Good |
Too small value |
Modifies a member variable of class MR::TriangulationParameters named critAngle. Parameter _this can not be null. It is a single object. When this function is called, this object will drop object references it held previously in critAngle.
| MRC_API void MR_TriangulationParameters_Set_critHoleLength | ( | MR_TriangulationParameters * | _this, |
| float | value ) |
Critical length of hole (all holes with length less then this value will be filled)
If value is subzero it is set automaticly to 0.7*bbox.diagonal() Modifies a member variable of class MR::TriangulationParameters named critHoleLength. Parameter _this can not be null. It is a single object. When this function is called, this object will drop object references it held previously in critHoleLength.
| MRC_API void MR_TriangulationParameters_Set_numNeighbours | ( | MR_TriangulationParameters * | _this, |
| int | value ) |
The number of nearest neighbor points to use for building of local triangulation.
|
Good |
Too small value |
Modifies a member variable of class MR::TriangulationParameters named numNeighbours. Parameter _this can not be null. It is a single object. When this function is called, this object will drop object references it held previously in numNeighbours.
| MRC_API void MR_TriangulationParameters_Set_radius | ( | MR_TriangulationParameters * | _this, |
| float | value ) |
Radius of neighborhood around each point to consider for building local triangulation. This is an alternative to numNeighbours parameter. Please set to positive value only one of them. Modifies a member variable of class MR::TriangulationParameters named radius. Parameter _this can not be null. It is a single object. When this function is called, this object will drop object references it held previously in radius.
| MRC_API void MR_TriangulationParameters_Set_searchNeighbors | ( | MR_TriangulationParameters * | _this, |
| const MR_PointCloud * | value ) |
optional: if provided this cloud will be used for searching of neighbors (so it must have same validPoints) Modifies a member variable of class MR::TriangulationParameters named searchNeighbors. Parameter _this can not be null. It is a single object. The reference to the parameter value might be preserved in this object in element searchNeighbors. When this function is called, this object will drop object references it held previously in searchNeighbors.