Mesh algorithms
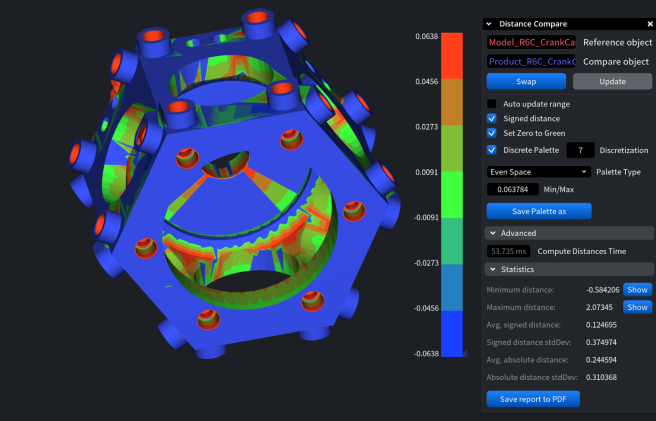
Distances
Fill/Stitch Hole(s)
Mesh Decimation
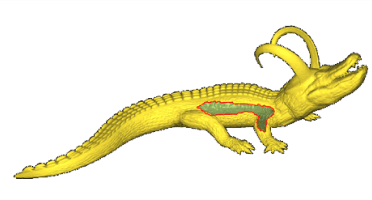
Shortest Geodesic
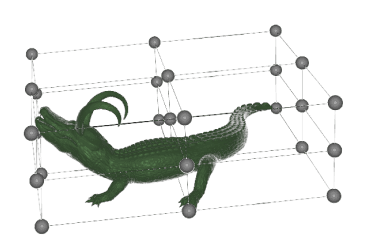
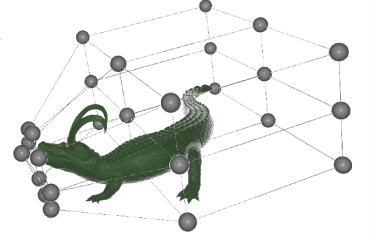
(surface) path building
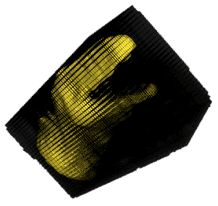
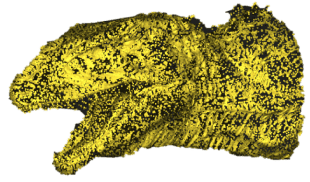
Iterative Closest Points
Tunnels fixing
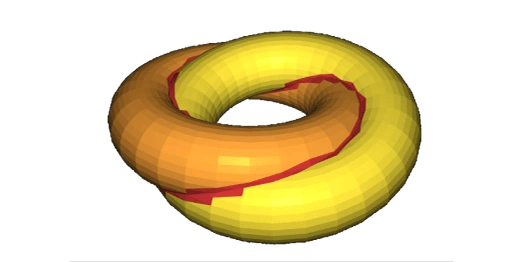
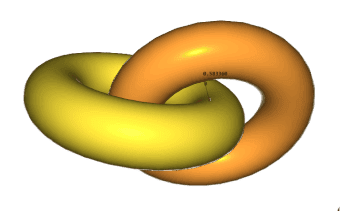
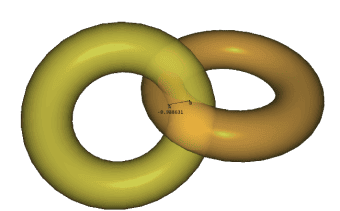
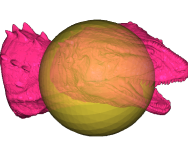
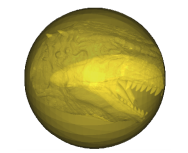
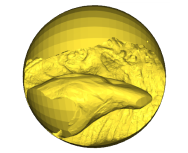
3D Boolean Operations
MeshInspector contains two implementations of 3D Boolean operations:
- Voxel-based, that first converts closed meshes in 3D raster image (voxels), then makes the operations, and then converts it back. Any self-intersections are supported in input meshes, and are automatically fixed in output.
- Direct mesh-based operations , which can work even with not-closed meshes and supports various input degeneracies. The main advantage over voxel-based mode is higher performance and extreme precision not limited by the size of one voxel.
Partial Offset
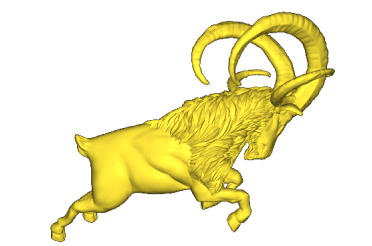
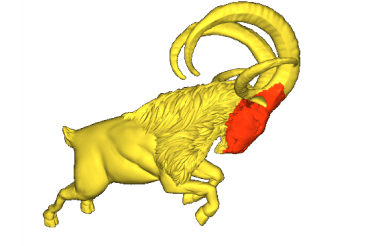
Segmentation by curvature