- Published: 2024-11-29
- Updated: 2025-10-14
- Dmitry Lambin
Succeeding in Precision in Normal Orientation for Complex Point Clouds
When it comes to 3D modeling and computer graphics, normals define surface direction within point clouds, which are, in turn, collections of points representing an object’s shape and spatial structure. Correctly oriented normals are pivotal for identifying the object’s inside and outside, a distinction which is, again, critical for proper mesh creation. That is, outward-facing one will interact differently with surface orientation than an inward-facing one, which could lead to a patchy or fragmented appearance on the mesh. All in all, incorrectly oriented normals result in a jagged, inconsistent surface where sections appear misaligned or reversed.
Maintaining a consistent orientation across complex clouds is a real headache. It is not uncommon for them to contain millions of points. On top of that, associated variations in data structure, density, and noise could result in inconsistent point cloud normals orientation. This leads to issues like defective geometry processing errors. Without adequate orientation, an object may appear patchy or with incorrectly oriented triangles. This cannot be tolerated, and this piece explores solutions to this challenge, comparing techniques from Open3D, CloudCompare, and MeshLib.
What is normal orientation in point clouds?
Normal orientation suggests aligning normals consistently across points in a 3D space. These normals represent the direction perpendicular to each surface point, which is essential for defining interior and exterior surfaces. In other words, when they are consistently oriented, it, once more, enables realistic lighting, shading, and structural analysis in 3D models.
The importance of the issue goes beyond sheer aesthetics. It is a prerequisite for accurate and reliable 3D representations, especially in such domains as architecture, medical imaging, and manufacturing. When working with detailed structures, e.g., an architectural scan, even slight discrepancies in point cloud normals orientation bring about faulty interpretations or inaccurate modeling outcomes.
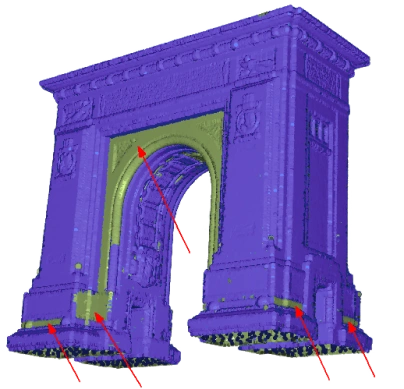
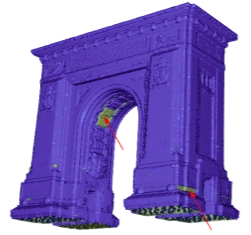
Take today’s object, a 3D model of a triumphal arch. Here, mismatched point cloud normals orientation would result in surface artifacts or unrealistic shading, as some surfaces might appear inverted, giving a flawed sense of depth or structure. Correct orientation not only improves visual accuracy but also supports precise geometry calculations, which are a must have for high-quality surface reconstruction from point cloud.
Addressing these issues requires sophisticated algorithms, i.e., those capable of processing and orienting large numbers efficiently.
Challenges arising with consistent normal orientation
Securing a consistent orientation across a large point cloud is universally puzzle-like. That is particularly so due to the unstructured nature of point data and variations in density. To reiterate, high-density clouds, noise, and intricate geometries present additional challenges that simple orientation methods cannot resolve, generating inconsistencies and computational bottlenecks.
In actual work practice, clouds vary significantly in terms of scale and complexity, from small, well-defined objects to large and intricate environments, like urban scans. Accordingly, the level of detail required per each use case impacts both the choice of algorithm and the parameters for point cloud normals orientation.
Traditional methods, like those based on the Minimum Spanning Tree (MST), are powerful, beyond doubts. They do offer dependable solutions. However, in dense clouds, where local neighborhood configurations get complex, these methods might encounter certain limitations, especially in terms of execution speed and consistency. Our approach builds upon the MST framework, enhancing it, so that it becomes capable of handling these exacting scenarios effectively.
What we mean: such tools as CloudCompare and Open3D, i.e., those implementing MST and tangent plane-based algorithms, may struggle with accuracy or speed, especially on large or noisy datasets, from time to time. To tackle this possibility, MeshLib introduces a leading-edge solution that refines point cloud normals orientation. It does so by leveraging local Delaunay triangulations and parallel processing, offering both correctness and efficiency for demanding initiatives.
Methods and Techniques: Consistent Orientation
To secure consistent orientation, engineers resort to several approaches, each with its strengths and limitations. Below, we are putting three alternatives to a test on a system with:
Here, we use a cloud of a triumphal arch from Eastern Europe, containing almost 300,000 points. Arches, especially those with intricate details, e.g., keystones and recessed surfaces, could be challenging to model due to their curved geometry and variable density. We’ve selected a complex example, one that serves as a tough test case to assess each technique’s performance.

a) Open3D
Open3D, an open-source library, leverages a tangent plane method for point cloud normals orientation. This course of action orients normals by analyzing the surface’s tangent at each point to establish an overall consistency.
Here’s a sample implementation:
import open3d as o3d
import time
pcd = o3d.io.read_point_cloud("arch-unoriented_normals.xyzn")
start = time.time()
pcd.orient_normals_consistent_tangent_plane(16)
end = time.time()
print('Open3d orient normals time: ', end - start, 'sec')
o3d.io.write_point_cloud("arch-open3d-orientation.xyzn", pcd)
How could one describe its potential in general and in this case in particular? Open3D is flexible and user-friendly, with a well-documented Python interface, making it accessible for quick prototyping and adjustments. However, the tangent plane approach leaves multiple incongruities, especially in dense clouds with complex surfaces like those in our arch example. The curved and recessed areas of the arch pose a challenge, often resulting in some normals facing inward, which impacts visual accuracy. In our case, red arrows indicate the places with incorrect orientation, which are multiple.
In our real-world scenario, Open3D took 11.3 seconds to somehow imprecisely process this large dataset. This, besides inconsistencies, makes it in a way slow for real-time applications in larger projects.
b) CloudCompare
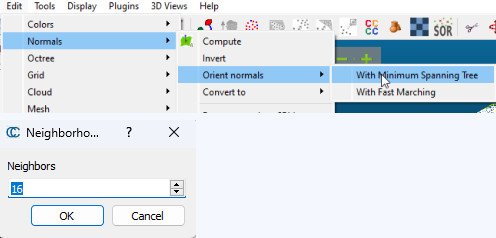
CloudCompare utilizes an MST-based route for orientation, accessible via its UI. By relying on MST, this system aims to find the shortest path, which yields relatively fast results. However, it might be also sensitive to noise and leave some inconsistencies in high-density areas. In addition, anyway, sharp edges and abrupt surface changes—like those in our triumphal arch—could lead to visible inconsistencies, especially where the geometry shifts sharply
One way or another, for our triumphal arch dataset, the MST perspective provides a speedier advantage, but still struggles with the complex geometry.
Our workflow:
Summing up, in this case, CloudCompare outpaces Open3D in terms of speed, taking only 4 seconds in testing, Yet, it still has limitations with complex surfaces, as seen in the arch’s structure. While some normals are correctly oriented, the software struggles with the deep recesses and angled surfaces, leaving minor misalignments.
Wrapping up, CloudCompare is really helpful for users searching for a GUI-based tool that mandates minimal scripting. However, convenience and precision notwithstanding, it still may not attain the validity required by advanced modeling applications sometimes.
c) MeshLib
The moment has come to examine MeshLib, combining MST with localized Delaunay triangulations. This framework reduces errors by isolating relevant points within the local structure of the cloud. Such a method is particularly effective with complex, high-density datasets like the triumphal arch, as it maintains high detail even in noisy data.
The proposed implementation route:
import meshlib.mrmeshpy as mr
import time
cloud = mr.loadPoints("arch-unoriented_normals.xyzn")
start = time.time()
settings = mr.TriangulationHelpersSettings()
settings.numNeis = 16
allLocal = mr.buildUnitedLocalTriangulations(cloud, settings)
cloud.normals = mr.makeOrientedNormals(cloud, allLocal)
end = time.time()
print('MeshLib make oriented normals: ', end - start, 'sec')
mr.savePoints(cloud, "arch-meshlib-normals.xyzn")
With a processing time of just 0.5 seconds, MeshLib visible outperforms both Open3D and CloudCompare in our scenario. A combination of MST and Delaunay triangulations empowers consistent orientation of normals even in high-density, complex point clouds.
In short, MeshLib successfully manages the intricate geometry of the triumphal arch, with its algorithm filtering out irrelevant points and “fueling” right orientation throughout the structure’s recesses and curves. By harnessing parallelization and using local triangulations, MeshLib’s high-level rule set efficiently handles enormous clouds. It turns us into a powerful direction for undertakings requiring both precision and speed.


Best Development Practices
To finalize the overview, we would put forward a range of professional practices and tricks. Through them, engineers are in the right position to improve point cloud normals orientation optimizing their efforts:
- Kick things off with clean data
Removing noise from the dataset helps sharpen normal orientation. Preprocessing steps, say, filtering and denoising, significantly strengthen your exactness, especially in noisy environments.
- Optimize neighborhood parameters
Adjust the number of neighbors based on dataset size and complexity. MeshLib enables customizable settings capable of adapting to the density and distribution of points in a cloud.
- Utilize parallel processing
MeshLib leverages parallelization to handle large datasets effectively, making it a top pick within intensive modeling workflows.
- Inspect things visually
Reviewing results at different stages ensures early detection of any inconsistencies, particularly in areas with sophisticated geometry or noise.
These practices, when combined with MeshLib, allow developers to achieve desired outcomes when resolving complex 3D point cloud reconstruction tasks. A clear understanding of how each parameter affects the outcome can also help in fine-tuning results for specific applications.
Conclusion
Consistent orientation of normals is fundamental in terms of high-quality 3D modeling. Proper results boost rendering fidelity, enhances structural analysis, and ensures realistic shading. All these properties are inevitably essential in multiple fields, ranging from virtual reality to industrial inspection.
MeshLib’s solution, combining local triangulation and MST with parallel processing, offers engineers a potent option to handle complex clouds effectively. As highlighted above, our tool represents a perfect-fit for engineers tackling extended or sophisticated objects. While Open3D and CloudCompare do promise a lot, MeshLib exceeds in certain situations.
To learn more or start working with MeshLib’s advanced techniques, visit the documentation and explore how we elevate the quality and performance of your models. With dependable and accurate orientation of point cloud normals, we will surely provide a solid foundation for ever-more authenticity and visually appealing 3D models.
Start Your Journey with MeshLib
MeshLib SDK offers multiple ways to dive in — from live technical demos to full application trials and hands-on SDK access. No complicated setups or hidden steps. Just the tools you need to start building smarter, faster, and better.